Rudolf Reiter
I am a postdoctoral researcher specializing in advanced controls, optimization, machine learning, and robotics.
My current work takes place in the
Robotics and Perception Group
under Prof. Davide Scaramuzza in Zürich, Switzerland, and in the
Systems Control and Optimization Laboratory
with Prof. Moritz Diehl at the University of Freiburg, Germany. A key focus of my research is on
learning- and optimization-based motion planning and control for autonomous systems,
particularly model-based reinforcement learning approaches that embed predictive
planners into RL policies.
Between 2021 and 2024, I pursued my Ph.D. at the University of Freiburg.
My thesis, titled “Optimization-Based Motion Planning and Obstacle Avoidance for Autonomous Driving and Racing”,
was funded by the prestigious
Marie-Skłodowska Curie Innovative Training Network
and supervised by Prof. Dr. Moritz Diehl.
In this work, I used numerical and combinatorial optimization techniques,
aided by machine learning methods, to address the computational demands of autonomous driving.
During my doctoral studies, I collaborated with leading research institutions and industry labs,
including IMT Lucca under Prof. Dr. Alberto Bemporad, the
Mitsubishi Electric Research Laboratories
in Cambridge, MA, and ETH Zürich with Prof. Dr. Melanie Zeilinger.
Prior to my Ph.D., I earned a Master's degree in Electrical Engineering
(with a focus on control systems) from Graz University of Technology, Austria, in 2016.
I then built several years of industry experience: first as a control systems specialist at
Anton Paar GmbH
(2016–2018), and later as an applied scientist at the
Virtual Vehicle Research Center
(2018–2021). Alongside my research activities,
I was also a member of the
Autonomous Racing Graz
team from 2021 to 2024, competing in real-world autonomous racing challenges.
Below, you can find further information such as a CV, a list of my publications and public talks.

Publications
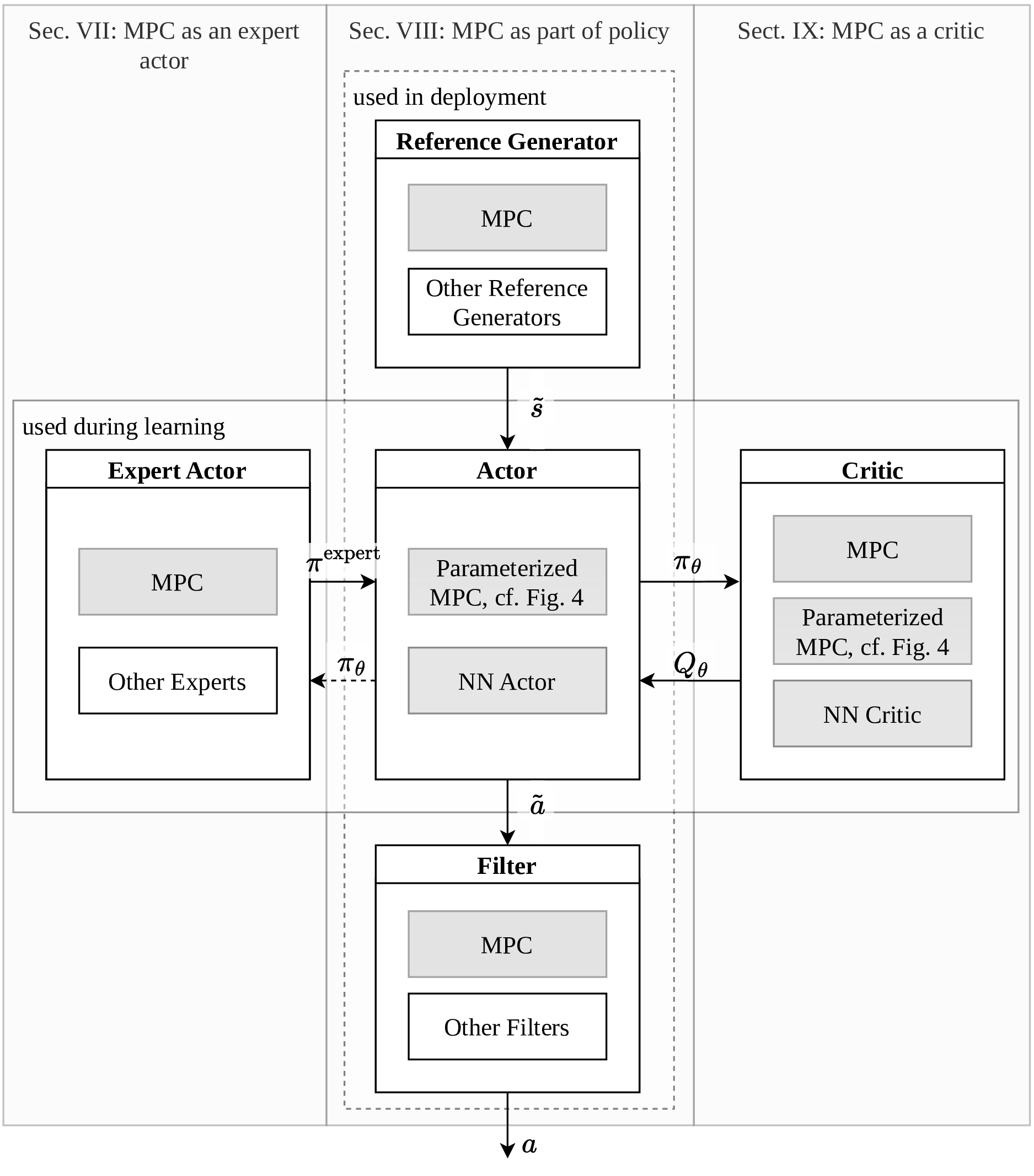
Rudolf Reiter, Jasper Hoffmann, Dirk Reinhardt, Florian Messerer, Katrin Baumgaertner, Shamburaj Sawant, Joschka Boedecker, Moritz Diehl, Sebastien Gros
arXiv.org, 2025
Project Page / Paper /
@InProceedings{Reiter2025synthesis,
author = {Rudolf Reiter and Jasper Hoffmann and Dirk Reinhardt and Florian Messerer and Katrin Baumgaertner and Shamburaj Sawant and Joschka Boedecker and Moritz Diehl and Sebastien Gros},
title = {Synthesis of Model Predictive Control and Reinforcement Learning: Survey and Classification},
booktitle = {arXiv.org},
year = {2025},
}
Rudolf Reiter
University of Freiburg, 2024
Project Page / Paper /
@InProceedings{Reiter2024optimization,
author = {Rudolf Reiter},
title = {Thesis: Optimization-based motion planning and obstacle avoidance for autonomous driving and racing},
booktitle = {University of Freiburg},
year = {2024},
}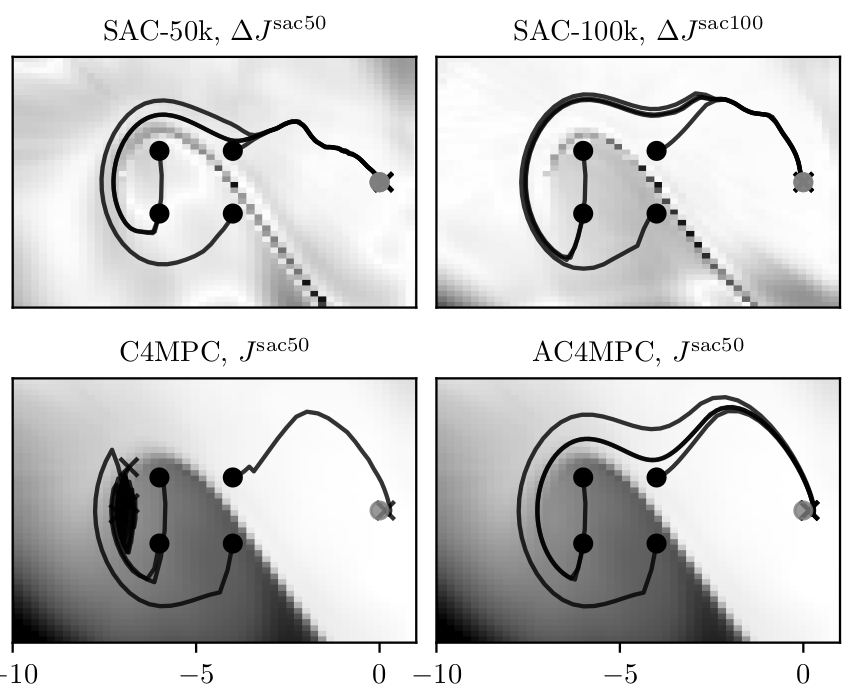
Rudolf Reiter, Andrea Ghezzi, Katrin Baumgärtner, Jasper Hoffmann, Robert McAllister, Moritz Diehl
arXiv.org, 2024
Project Page / Paper / Video /
@InProceedings{reiter2024ac4mpc,
author = {Rudolf Reiter and Andrea Ghezzi and Katrin Baumgärtner and Jasper Hoffmann and Robert McAllister and Moritz Diehl},
title = {AC4MPC: Actor-Critic Reinforcement Learning for Nonlinear Model Predictive Control},
booktitle = {arXiv.org},
year = {2024},
}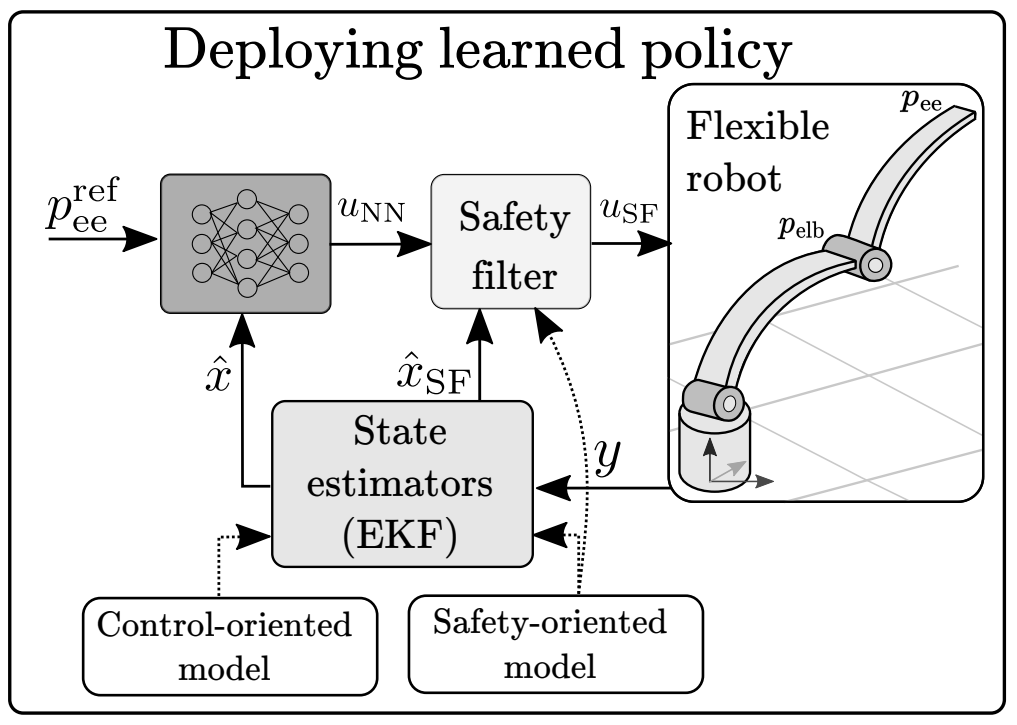
Shamil Mamedov, Rudolf Reiter, Seyed Azad, Ruan Viljoen, Joschka Boedecker, Moritz Diehl, Jan Swevers
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Project Page / Paper / Video / Code /
@InProceedings{mamedov_safety_2024,
author = {Shamil Mamedov and Rudolf Reiter and Seyed Azad and Ruan Viljoen and Joschka Boedecker and Moritz Diehl and Jan Swevers},
title = {Safe Imitation Learning of Nonlinear Model Predictive Control for Flexible Robots},
booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2024},
}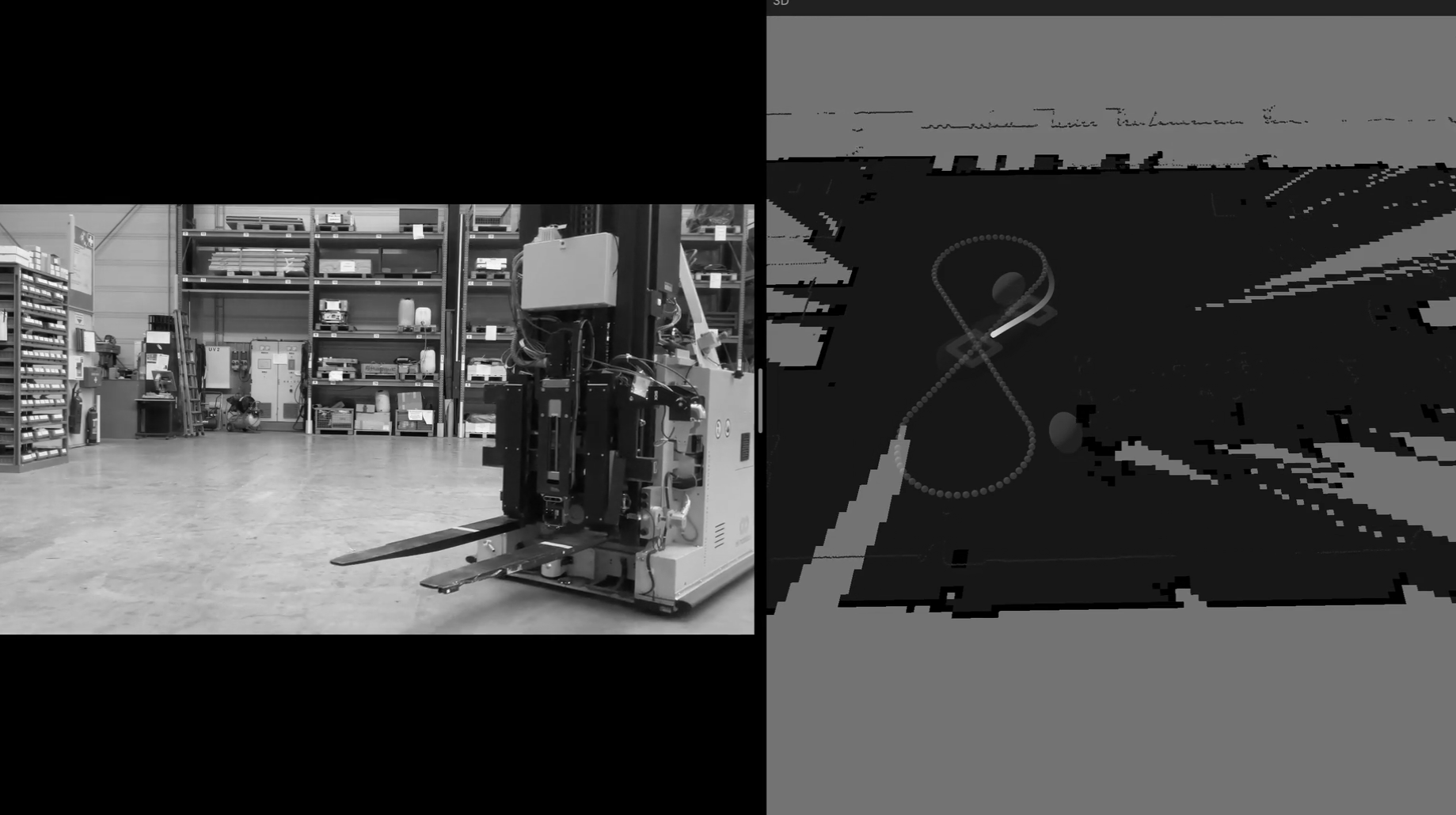
Akash Subash, Daniel Kloeser, Jonathan Frey, Rudolf Reiter, Moritz Diehl, Karsten Bohlmann
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Project Page / Paper / Video /
@InProceedings{akash_model_2024,
author = {Akash Subash and Daniel Kloeser and Jonathan Frey and Rudolf Reiter and Moritz Diehl and Karsten Bohlmann},
title = {Model Predictive Control for Frenet-Cartesian Trajectory Tracking of a Tricycle Kinematic Automated Guided Vehicle},
booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2024},
}
Rudolf Reiter, Katrin Baumgärtner, Rien Quirynen, Moritz Diehl
European Control Conference (ECC), 2024
Project Page / Paper /
@InProceedings{reiter_progressive_2024,
author = {Rudolf Reiter and Katrin Baumgärtner and Rien Quirynen and Moritz Diehl},
title = {Progressive Smoothing for Motion Planning in Real-Time NMPC},
booktitle = {European Control Conference (ECC)},
year = {2024},
}
Rudolf Reiter, Rien Quirynen, Moritz Diehl, Stefano Di Cairano
IEEE Transactions on Control Systems Technology (TCST), 2024
Project Page / Paper /
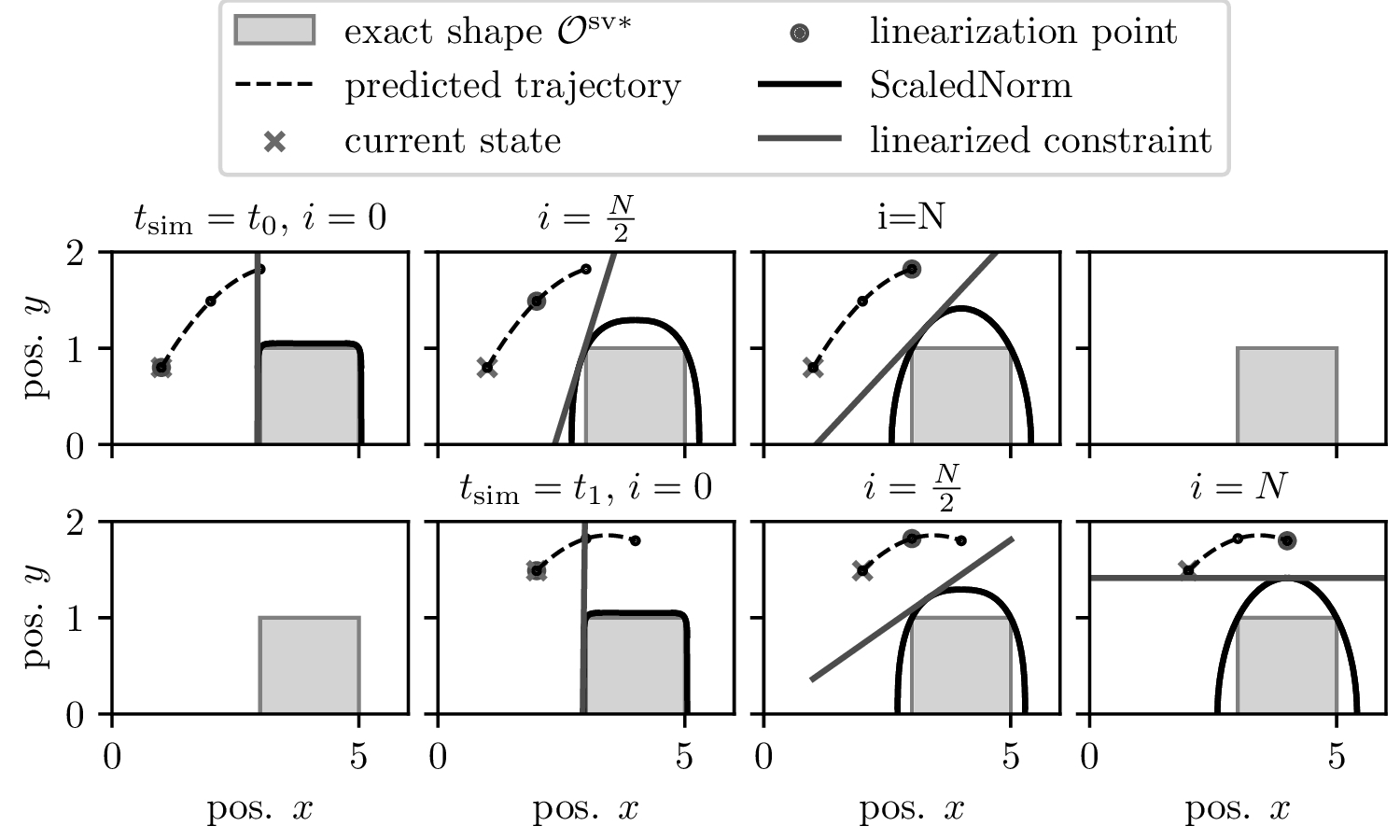
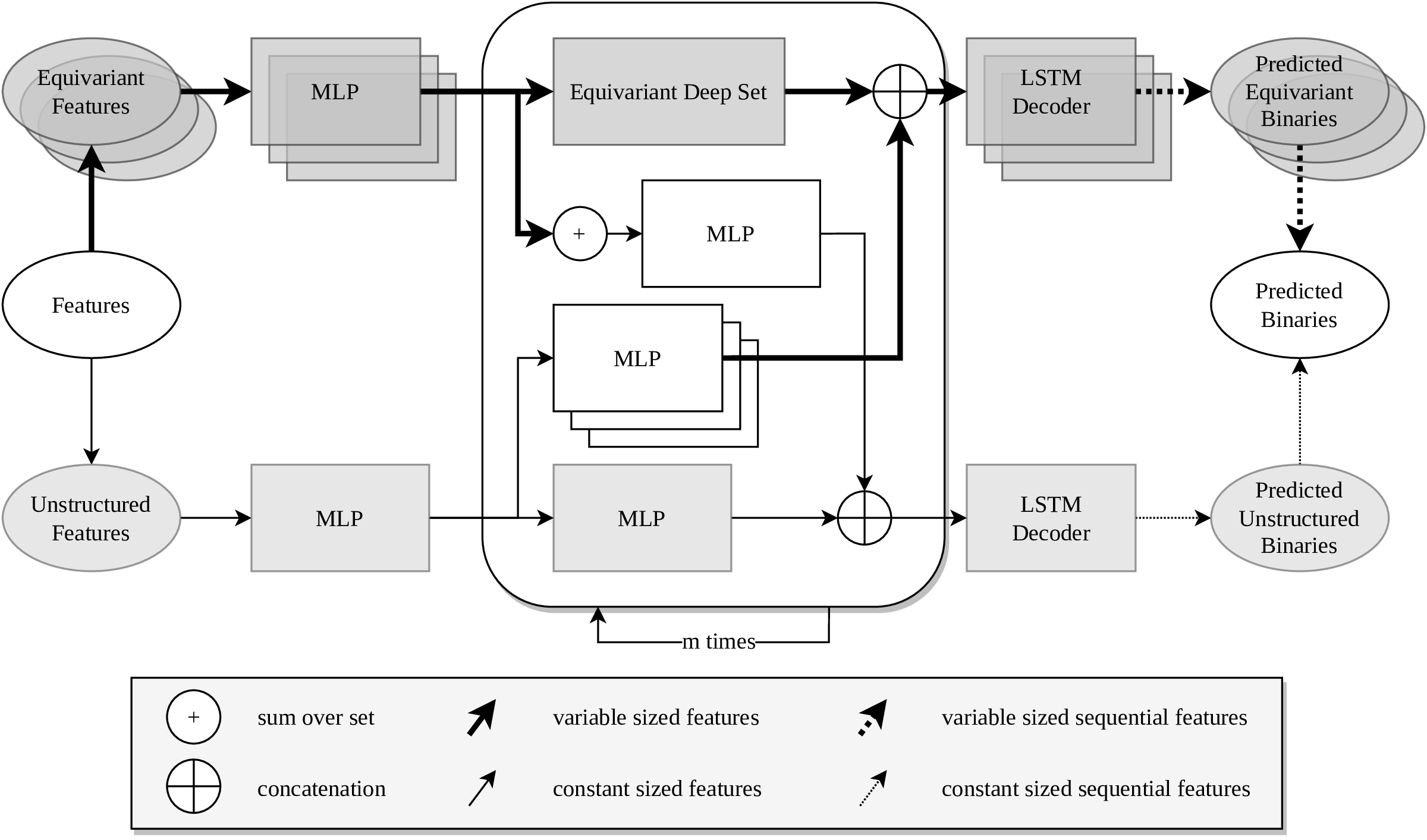
@InProceedings{reiter_equivariant_2024,
author = {Rudolf Reiter and Rien Quirynen and Moritz Diehl and Stefano Di Cairano},
title = {Equivariant Deep Learning of Mixed-Integer Optimal Control Solutions for Vehicle Decision Making and Motion Planning},
booktitle = {IEEE Transactions on Control Systems Technology (TCST)},
year = {2024},
}
Rudolf Reiter, Armin Nurkanović, Daniele Bernardini, Moritz Diehl, Alberto Bemporad
IEEE Transactions on Intelligent Vehicles (TIV), 2024
Project Page / Paper / Video /
@InProceedings{reiter_long_short_term_2024,
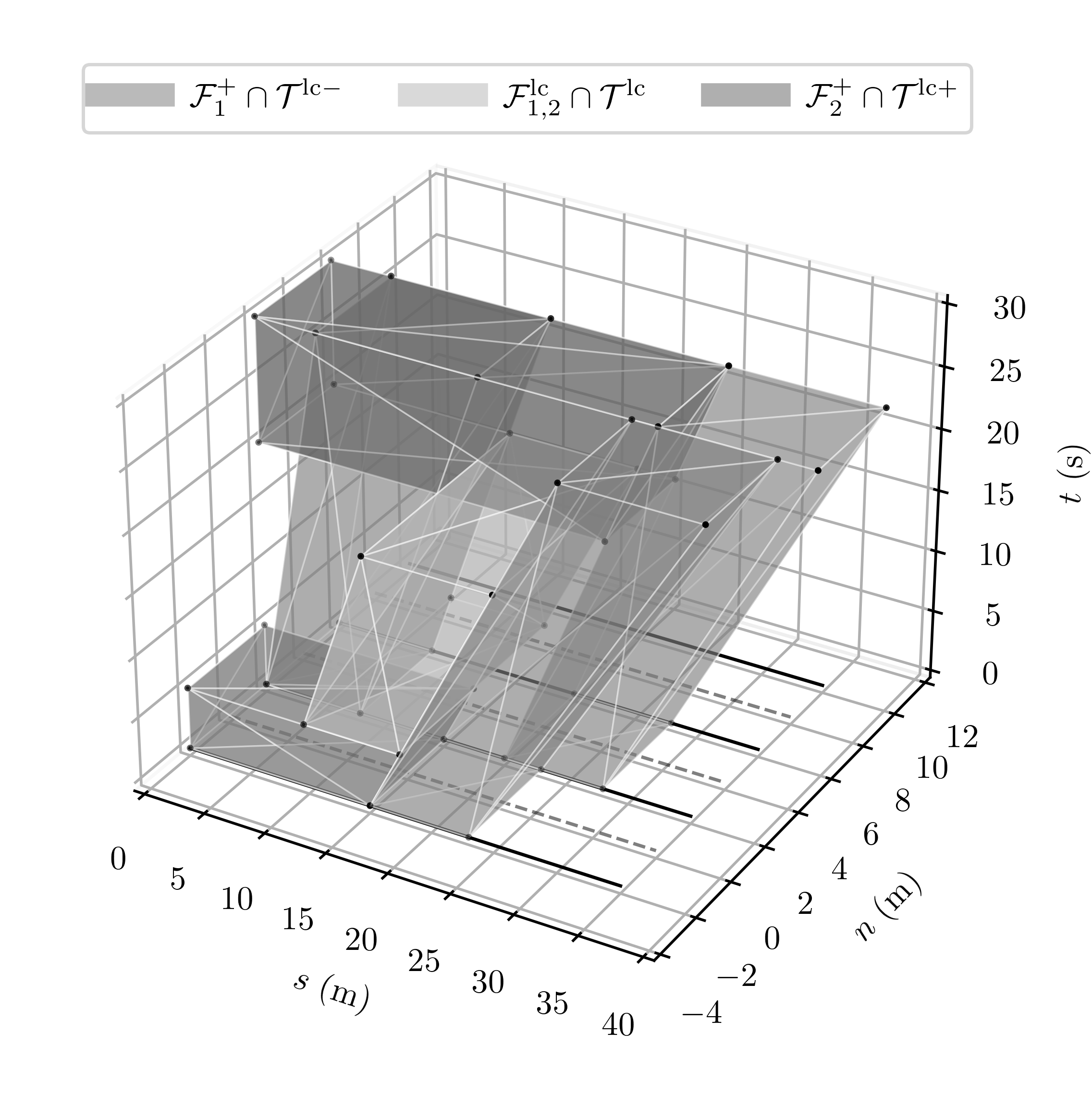
author = {Rudolf Reiter and Armin Nurkanović and Daniele Bernardini and Moritz Diehl and Alberto Bemporad},
title = {A Long-Short-Term Mixed-Integer Formulation for Highway Lane Change Planning},
booktitle = {IEEE Transactions on Intelligent Vehicles (TIV)},
year = {2024},
}
Rudolf Reiter, Armin Nurkanović, Jonathan Frey, Moritz Diehl
European Journal of Control, 2023
Project Page / Paper /
@InProceedings{reiter_frenet-cartesian_2023,
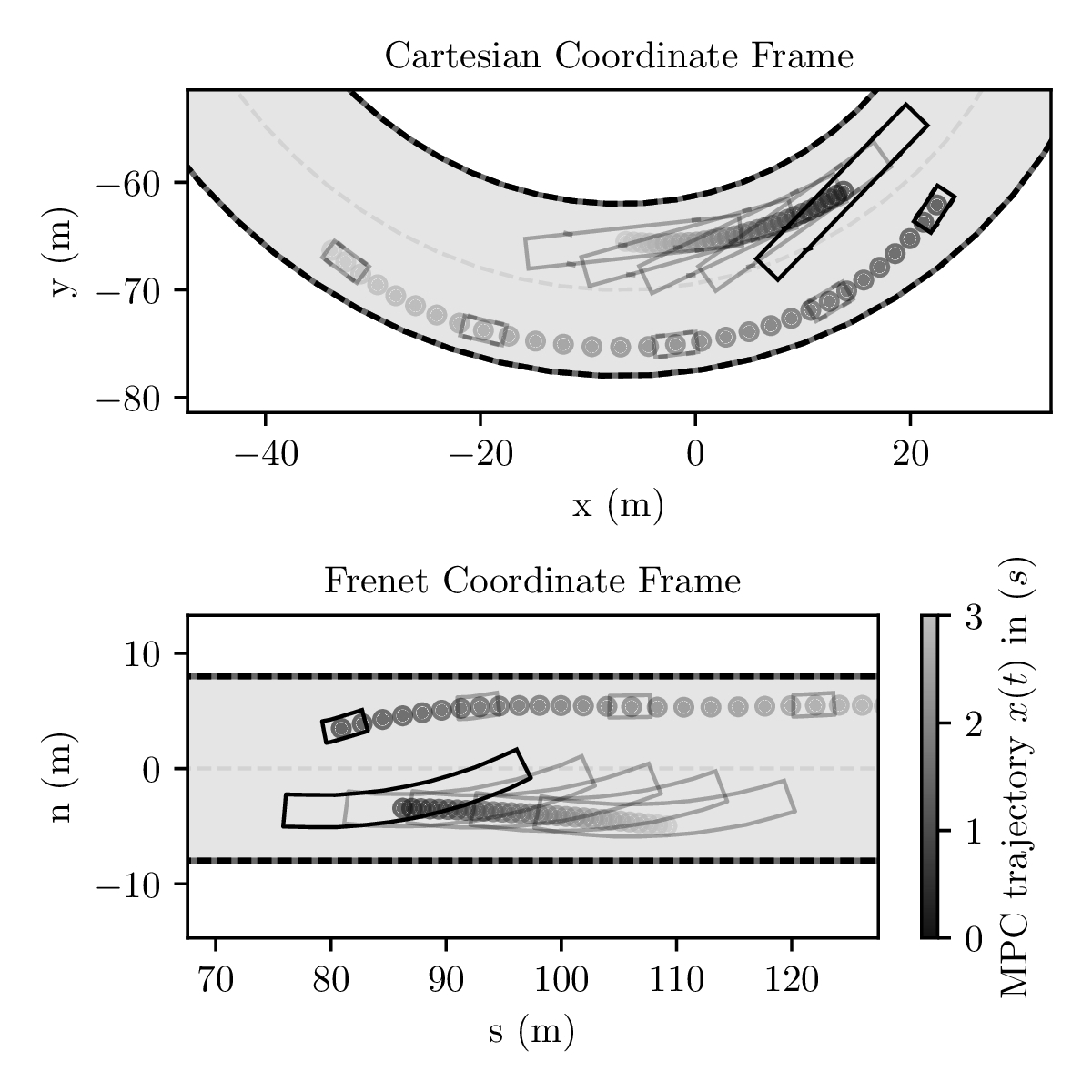
author = {Rudolf Reiter and Armin Nurkanović and Jonathan Frey and Moritz Diehl},
title = {Frenet-Cartesian model representations for automotive obstacle avoidance within nonlinear MPC},
booktitle = {European Journal of Control},
year = {2023},
}
Rudolf Reiter, Jasper Hoffmann, Joschka Boedecker, Moritz Diehl
European Control Conference (ECC), 2023
Project Page / Paper / Video /
@InProceedings{reiter_hierarchical_2023,
author = {Rudolf Reiter and Jasper Hoffmann and Joschka Boedecker and Moritz Diehl},
title = {A Hierarchical Approach for Strategic Motion Planning in Autonomous Racing},
booktitle = {European Control Conference (ECC)},
year = {2023},
}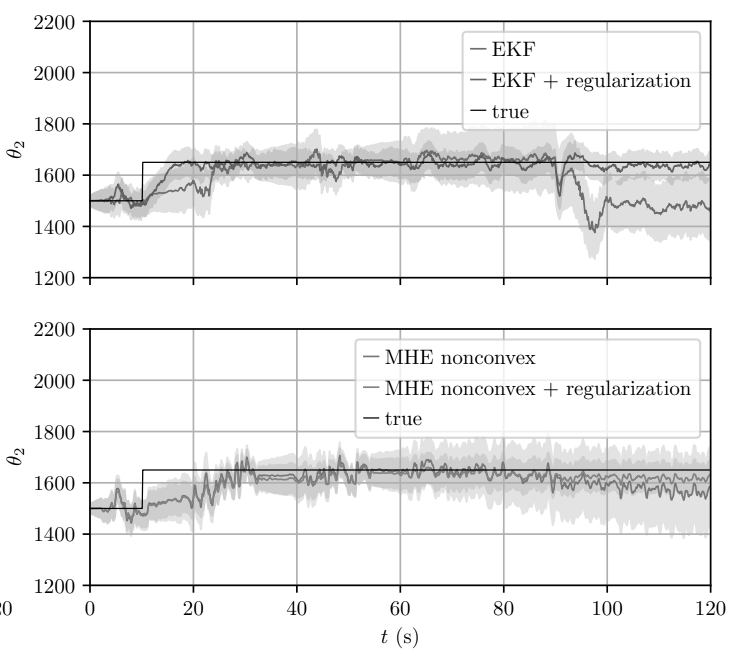
Katrin Baumgartner, Rudolf Reiter, Moritz Diehl
IEEE Conference on Decision and Control (CDC, 2022
Project Page / Paper /
@InProceedings{baumgartner_moving_2022,
author = {Katrin Baumgartner and Rudolf Reiter and Moritz Diehl},
title = {Moving Horizon Estimation with Adaptive Regularization for Ill-Posed State and Parameter Estimation Problems},
booktitle = {IEEE Conference on Decision and Control (CDC},
year = {2022},
}
Rudolf Reiter, Florian Messerer, Markus Schratter, Daniel Watzenig, Moritz Diehl
European Control Conference (ECC), 2022
Project Page / Paper /
@InProceedings{reiter_inverse_2022,
author = {Rudolf Reiter and Florian Messerer and Markus Schratter and Daniel Watzenig and Moritz Diehl},
title = {An Inverse Optimal Control Approach for Trajectory Prediction of Autonomous Race Cars},
booktitle = {European Control Conference (ECC)},
year = {2022},
}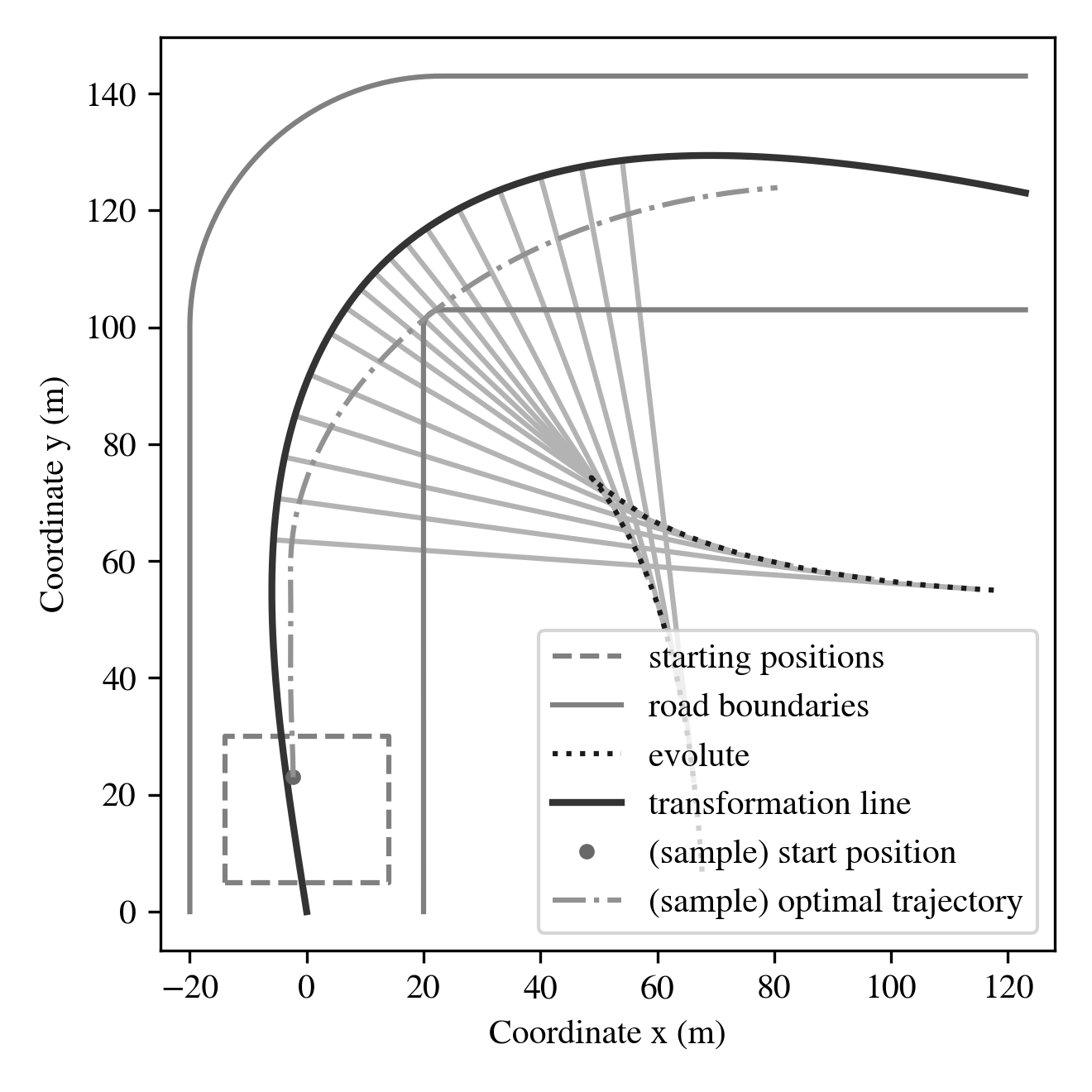
Rudolf Reiter, Moritz Diehl
European Control Conference (ECC), 2021
Project Page / Paper /
@InProceedings{reiter_parameterization_2021,
author = {Rudolf Reiter and Moritz Diehl},
title = {Parameterization Approach of the Frenet Transformation for Model Predictive Control of Autonomous Vehicles},
booktitle = {European Control Conference (ECC)},
year = {2021},
}
Rudolf Reiter, Martin Kirchengast, Daniel Watzenig, Moritz Diehl
IFAC Conference on Nonlinear Model Predictive Control (IFAC NMPC), 2021
Project Page / Paper / Video /
@InProceedings{reiter_mixed-integer_2021,
author = {Rudolf Reiter and Martin Kirchengast and Daniel Watzenig and Moritz Diehl},
title = {Mixed-integer optimization-based planning for autonomous racing with obstacles and rewards},
booktitle = {IFAC Conference on Nonlinear Model Predictive Control (IFAC NMPC)},
year = {2021},
}Talks

European Control Conference 2024, 2024
Slides

Systems Control and Optimization Laboratory, Workshop on Control, Optimization and Renewable Energy Systems, 2024
Slides

ETH Zurich - Institute for Automatic Control, Coffee Talks, 2024
Slides
ETH Zurich - Institute for Dynamic Systems and Control, Tech Talks, 2024
Slides

KTH Royal Institute of Technology, Transport Seminars, 2023
Slides
Homepage Template
This homepage is based on a template of Michael Niemeyer.